The Hull Problem
The Hull problem is a 1-DOF optimal control problem [Hul03]. It can be stated as:
Minimize the control effort required to move a frictionless sliding block from some initial position such that the final displacement from a pre-specified point is minimized.
State and control variables
This system has one state variables, the position (\(x\)) of the sliding block.
This system has a single control variable (\(u\)), the velocity of the block.
The dynamics of the system are governed by
(48)\[\begin{align}
\dot{x} &= u
\end{align}\]
Problem Definition
We seek to minimize the control effort required and minimize the displacement from the origin.
(49)\[\begin{align}
\mathrm{Minimize} \, J &= 2.5x_f^2 \, + \, 0.5 \int_0^1 u^2 dt
\end{align}\]
Subject to the initial conditions
(50)\[\begin{align}
t_0 &= 0.0 \\
x_0 &= 1.5
\end{align}\]
and the terminal constraints
(51)\[\begin{align}
t_f &= 10.0
\end{align}\]
Dealing with combined terminal and integral costs in Dymos
In classic optimal control, the objective is often broken into the terminal component (the Mayer term) and the integral component (the Lagrange term).
Dymos does not distinguish between the two.
In this case, since the objective \(J\) consists of both a terminal cost and an integrated cost (Bolza form), we add a term to the ODE to account for the integrated quantity
(52)\[\begin{align}
\dot{x_L} &= L \\
L &= 0.5 u^2
\end{align}\]
where \(x_L\) is a state added to account for the Lagrange term.
Dymos supports the definition of simple mathematical expressions as the cost, so the final value of \(x_L\) can be added to the final value of \(2.5x^2\).
Defining the ODE
The following code implements the equations of motion for the Hull problem.
Since the rate of \(x\) is given by a control (\(u\)), there is no need to compute its rate in the ODE.
Dymos can pull their values from those other states and controls.
The ODE, therefore, only needs to compute the rate of change of \(x_L\) (\(L\)).
A few things to note:
By providing the tag dymos.state_rate_source:{name}, we’re letting Dymos know what states need to be integrated, there’s no need to specify a rate source when using this ODE in our Phase.
Pairing the above tag with dymos.state_units:{units} means we don’t have to specify units when setting properties for the state in our run script.
Solving the Hull problem with Dymos
The following script solves the Hull problem with Dymos.
To begin, import the packages we require:
We then instantiate an OpenMDAO problem and set the optimizer and its options.
The call to declare_coloring tells the optimizer to attempt to find a sparsity pattern that minimizes the work required to compute the derivatives across the model.
Next, we add a Dymos Trajectory group to the problem’s model and add a phase to it.
In this case we’re using the Radau pseudospectral transcription to solve the problem.
At this point, we set the options on the main variables used in a Dymos phase.
In addition to time, we have two states (x, and x_L) and a single control (u).
Here we use bounds on the states themselves to constrain the initial values of x and1 x_L.
From an optimization perspective, this means that we are removing the first and last values in the state histories of \(x\) and \(x_L\) from the vector of design variables.
Their initial values will remain unchanged throughout the optimization process.
On the other hand, we could specify fix_initial=False, fix_final=False for these values, and Dymos would be free to change them.
We would then need to put a boundary constraint in place to enforce their final values.
Feel free to experiment with different ways of enforcing the boundary constraints on this problem and see how it affects performance.
The scaler values (ref) are all set to 1 here.
Also, we don’t need to specify targets for any of the variables here because their names are the targets in the top-level of the model.
The rate source and units for the states are obtained from the tags in the ODE component we previously defined.
<openmdao.core.problem.Problem at 0x7f8e03975160>
We then set the initial guesses for the variables in the problem and solve it.
We’re using the phase interp method to provide initial guesses for the states and controls.
In this case, by giving it two values, it is linearly interpolating from the first value to the second value, and then returning the interpolated value at the input nodes for the given variable.
Finally, we use the dymos.run_problem method to execute the problem.
This interface allows us to do some things that the standard OpenMDAO problem.run_driver interface does not.
It will automatically record the final solution achieved by the optimizer in case named 'final' in a file called dymos_solution.db.
By specifying simulate=True, it will automatically follow the solution with an explicit integration using scipy.solve_ivp.
The results of the simulation are stored in a case named final in the file dymos_simulation.db.
This explicit simulation demonstrates how the system evolved with the given controls, and serves as a check that we’re using a dense enough grid (enough segments and segments of sufficient order) to accurately represent the solution.
If those two solution didn’t agree reasonably well, we could rerun the problem with a more dense grid.
Instead, we’re asking Dymos to automatically change the grid if necessary by specifying refine_method='ph'.
This will attempt to repeatedly solve the problem and change the number of segments and segment orders until the solution is in reasonable agreement.
Show code cell output
Hide code cell output
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/core/group.py:3165: UnitsWarning:'traj.phases.phase0' <class Phase>: Output 'traj.phases.phase0.param_comp.parameter_vals:u' with units of '1/s' is connected to input 'traj.phases.phase0.rhs_all.user_ode.u' which has no units.
Jacobian shape: (145, 145) (3.41% nonzero)
FWD solves: 5 REV solves: 0
Total colors vs. total size: 5 vs 145 (96.55% improvement)
Sparsity computed using tolerance: 1e-25.
Dense total jacobian for Problem 'problem' was computed 3 times.
Time to compute sparsity: 0.1295 sec
Time to compute coloring: 0.0894 sec
Memory to compute coloring: 0.2305 MB
Coloring created on: 2026-05-13 14:57:07
Optimization Problem -- Optimization using pyOpt_sparse
================================================================================
Objective Function: _objfunc
Solution:
--------------------------------------------------------------------------------
Total Time: 0.4919
User Objective Time : 0.0073
User Sensitivity Time : 0.3714
Interface Time : 0.0388
Opt Solver Time: 0.0743
Calls to Objective Function : 11
Calls to Sens Function : 10
Objectives
Index Name Value
0 traj.phase0.rhs_all.J 9.375000E-01
Variables (c - continuous, i - integer, d - discrete)
Index Name Type Lower Bound Value Upper Bound Status
0 traj.phase0.parameters:u_0 c -1.000000E+30 -1.250017E+00 1.000000E+30
1 traj.phase0.states:x_0 c -1.000000E+30 1.481508E+00 1.000000E+30
2 traj.phase0.states:x_1 c -1.000000E+30 1.455992E+00 1.000000E+30
3 traj.phase0.states:x_2 c -1.000000E+30 1.447916E+00 1.000000E+30
4 traj.phase0.states:x_3 c -1.000000E+30 1.429423E+00 1.000000E+30
5 traj.phase0.states:x_4 c -1.000000E+30 1.403908E+00 1.000000E+30
6 traj.phase0.states:x_5 c -1.000000E+30 1.395832E+00 1.000000E+30
7 traj.phase0.states:x_6 c -1.000000E+30 1.377339E+00 1.000000E+30
8 traj.phase0.states:x_7 c -1.000000E+30 1.351824E+00 1.000000E+30
9 traj.phase0.states:x_8 c -1.000000E+30 1.343748E+00 1.000000E+30
10 traj.phase0.states:x_9 c -1.000000E+30 1.325255E+00 1.000000E+30
11 traj.phase0.states:x_10 c -1.000000E+30 1.299739E+00 1.000000E+30
12 traj.phase0.states:x_11 c -1.000000E+30 1.291664E+00 1.000000E+30
13 traj.phase0.states:x_12 c -1.000000E+30 1.273171E+00 1.000000E+30
14 traj.phase0.states:x_13 c -1.000000E+30 1.247655E+00 1.000000E+30
15 traj.phase0.states:x_14 c -1.000000E+30 1.239580E+00 1.000000E+30
16 traj.phase0.states:x_15 c -1.000000E+30 1.221087E+00 1.000000E+30
17 traj.phase0.states:x_16 c -1.000000E+30 1.195571E+00 1.000000E+30
18 traj.phase0.states:x_17 c -1.000000E+30 1.187496E+00 1.000000E+30
19 traj.phase0.states:x_18 c -1.000000E+30 1.169003E+00 1.000000E+30
20 traj.phase0.states:x_19 c -1.000000E+30 1.143487E+00 1.000000E+30
21 traj.phase0.states:x_20 c -1.000000E+30 1.135412E+00 1.000000E+30
22 traj.phase0.states:x_21 c -1.000000E+30 1.116919E+00 1.000000E+30
23 traj.phase0.states:x_22 c -1.000000E+30 1.091403E+00 1.000000E+30
24 traj.phase0.states:x_23 c -1.000000E+30 1.083328E+00 1.000000E+30
25 traj.phase0.states:x_24 c -1.000000E+30 1.064835E+00 1.000000E+30
26 traj.phase0.states:x_25 c -1.000000E+30 1.039319E+00 1.000000E+30
27 traj.phase0.states:x_26 c -1.000000E+30 1.031244E+00 1.000000E+30
28 traj.phase0.states:x_27 c -1.000000E+30 1.012751E+00 1.000000E+30
29 traj.phase0.states:x_28 c -1.000000E+30 9.872351E-01 1.000000E+30
30 traj.phase0.states:x_29 c -1.000000E+30 9.791594E-01 1.000000E+30
31 traj.phase0.states:x_30 c -1.000000E+30 9.606669E-01 1.000000E+30
32 traj.phase0.states:x_31 c -1.000000E+30 9.351511E-01 1.000000E+30
33 traj.phase0.states:x_32 c -1.000000E+30 9.270754E-01 1.000000E+30
34 traj.phase0.states:x_33 c -1.000000E+30 9.085829E-01 1.000000E+30
35 traj.phase0.states:x_34 c -1.000000E+30 8.830670E-01 1.000000E+30
36 traj.phase0.states:x_35 c -1.000000E+30 8.749913E-01 1.000000E+30
37 traj.phase0.states:x_36 c -1.000000E+30 8.564988E-01 1.000000E+30
38 traj.phase0.states:x_37 c -1.000000E+30 8.309830E-01 1.000000E+30
39 traj.phase0.states:x_38 c -1.000000E+30 8.229073E-01 1.000000E+30
40 traj.phase0.states:x_39 c -1.000000E+30 8.044148E-01 1.000000E+30
41 traj.phase0.states:x_40 c -1.000000E+30 7.788989E-01 1.000000E+30
42 traj.phase0.states:x_41 c -1.000000E+30 7.708232E-01 1.000000E+30
43 traj.phase0.states:x_42 c -1.000000E+30 7.523307E-01 1.000000E+30
44 traj.phase0.states:x_43 c -1.000000E+30 7.268149E-01 1.000000E+30
45 traj.phase0.states:x_44 c -1.000000E+30 7.187392E-01 1.000000E+30
46 traj.phase0.states:x_45 c -1.000000E+30 7.002467E-01 1.000000E+30
47 traj.phase0.states:x_46 c -1.000000E+30 6.747308E-01 1.000000E+30
48 traj.phase0.states:x_47 c -1.000000E+30 6.666551E-01 1.000000E+30
49 traj.phase0.states:x_48 c -1.000000E+30 6.481626E-01 1.000000E+30
50 traj.phase0.states:x_49 c -1.000000E+30 6.226467E-01 1.000000E+30
51 traj.phase0.states:x_50 c -1.000000E+30 6.145711E-01 1.000000E+30
52 traj.phase0.states:x_51 c -1.000000E+30 5.960786E-01 1.000000E+30
53 traj.phase0.states:x_52 c -1.000000E+30 5.705627E-01 1.000000E+30
54 traj.phase0.states:x_53 c -1.000000E+30 5.624870E-01 1.000000E+30
55 traj.phase0.states:x_54 c -1.000000E+30 5.439945E-01 1.000000E+30
56 traj.phase0.states:x_55 c -1.000000E+30 5.184786E-01 1.000000E+30
57 traj.phase0.states:x_56 c -1.000000E+30 5.104029E-01 1.000000E+30
58 traj.phase0.states:x_57 c -1.000000E+30 4.919104E-01 1.000000E+30
59 traj.phase0.states:x_58 c -1.000000E+30 4.663946E-01 1.000000E+30
60 traj.phase0.states:x_59 c -1.000000E+30 4.583189E-01 1.000000E+30
61 traj.phase0.states:x_60 c -1.000000E+30 4.398264E-01 1.000000E+30
62 traj.phase0.states:x_61 c -1.000000E+30 4.143105E-01 1.000000E+30
63 traj.phase0.states:x_62 c -1.000000E+30 4.062348E-01 1.000000E+30
64 traj.phase0.states:x_63 c -1.000000E+30 3.877423E-01 1.000000E+30
65 traj.phase0.states:x_64 c -1.000000E+30 3.622265E-01 1.000000E+30
66 traj.phase0.states:x_65 c -1.000000E+30 3.541508E-01 1.000000E+30
67 traj.phase0.states:x_66 c -1.000000E+30 3.356583E-01 1.000000E+30
68 traj.phase0.states:x_67 c -1.000000E+30 3.101424E-01 1.000000E+30
69 traj.phase0.states:x_68 c -1.000000E+30 3.020667E-01 1.000000E+30
70 traj.phase0.states:x_69 c -1.000000E+30 2.835742E-01 1.000000E+30
71 traj.phase0.states:x_70 c -1.000000E+30 2.580584E-01 1.000000E+30
72 traj.phase0.states:x_71 c -1.000000E+30 2.499827E-01 1.000000E+30
73 traj.phase0.states:xL_0 c -1.000000E+30 1.155797E-02 1.000000E+30
74 traj.phase0.states:xL_1 c -1.000000E+30 2.750561E-02 1.000000E+30
75 traj.phase0.states:xL_2 c -1.000000E+30 3.255299E-02 1.000000E+30
76 traj.phase0.states:xL_3 c -1.000000E+30 4.411096E-02 1.000000E+30
77 traj.phase0.states:xL_4 c -1.000000E+30 6.005860E-02 1.000000E+30
78 traj.phase0.states:xL_5 c -1.000000E+30 6.510597E-02 1.000000E+30
79 traj.phase0.states:xL_6 c -1.000000E+30 7.666394E-02 1.000000E+30
80 traj.phase0.states:xL_7 c -1.000000E+30 9.261158E-02 1.000000E+30
81 traj.phase0.states:xL_8 c -1.000000E+30 9.765896E-02 1.000000E+30
82 traj.phase0.states:xL_9 c -1.000000E+30 1.092169E-01 1.000000E+30
83 traj.phase0.states:xL_10 c -1.000000E+30 1.251646E-01 1.000000E+30
84 traj.phase0.states:xL_11 c -1.000000E+30 1.302119E-01 1.000000E+30
85 traj.phase0.states:xL_12 c -1.000000E+30 1.417699E-01 1.000000E+30
86 traj.phase0.states:xL_13 c -1.000000E+30 1.577176E-01 1.000000E+30
87 traj.phase0.states:xL_14 c -1.000000E+30 1.627649E-01 1.000000E+30
88 traj.phase0.states:xL_15 c -1.000000E+30 1.743229E-01 1.000000E+30
89 traj.phase0.states:xL_16 c -1.000000E+30 1.902705E-01 1.000000E+30
90 traj.phase0.states:xL_17 c -1.000000E+30 1.953179E-01 1.000000E+30
91 traj.phase0.states:xL_18 c -1.000000E+30 2.068759E-01 1.000000E+30
92 traj.phase0.states:xL_19 c -1.000000E+30 2.228235E-01 1.000000E+30
93 traj.phase0.states:xL_20 c -1.000000E+30 2.278709E-01 1.000000E+30
94 traj.phase0.states:xL_21 c -1.000000E+30 2.394289E-01 1.000000E+30
95 traj.phase0.states:xL_22 c -1.000000E+30 2.553765E-01 1.000000E+30
96 traj.phase0.states:xL_23 c -1.000000E+30 2.604239E-01 1.000000E+30
97 traj.phase0.states:xL_24 c -1.000000E+30 2.719819E-01 1.000000E+30
98 traj.phase0.states:xL_25 c -1.000000E+30 2.879295E-01 1.000000E+30
99 traj.phase0.states:xL_26 c -1.000000E+30 2.929769E-01 1.000000E+30
100 traj.phase0.states:xL_27 c -1.000000E+30 3.045348E-01 1.000000E+30
101 traj.phase0.states:xL_28 c -1.000000E+30 3.204825E-01 1.000000E+30
102 traj.phase0.states:xL_29 c -1.000000E+30 3.255299E-01 1.000000E+30
103 traj.phase0.states:xL_30 c -1.000000E+30 3.370878E-01 1.000000E+30
104 traj.phase0.states:xL_31 c -1.000000E+30 3.530355E-01 1.000000E+30
105 traj.phase0.states:xL_32 c -1.000000E+30 3.580828E-01 1.000000E+30
106 traj.phase0.states:xL_33 c -1.000000E+30 3.696408E-01 1.000000E+30
107 traj.phase0.states:xL_34 c -1.000000E+30 3.855885E-01 1.000000E+30
108 traj.phase0.states:xL_35 c -1.000000E+30 3.906358E-01 1.000000E+30
109 traj.phase0.states:xL_36 c -1.000000E+30 4.021938E-01 1.000000E+30
110 traj.phase0.states:xL_37 c -1.000000E+30 4.181414E-01 1.000000E+30
111 traj.phase0.states:xL_38 c -1.000000E+30 4.231888E-01 1.000000E+30
112 traj.phase0.states:xL_39 c -1.000000E+30 4.347468E-01 1.000000E+30
113 traj.phase0.states:xL_40 c -1.000000E+30 4.506944E-01 1.000000E+30
114 traj.phase0.states:xL_41 c -1.000000E+30 4.557418E-01 1.000000E+30
115 traj.phase0.states:xL_42 c -1.000000E+30 4.672998E-01 1.000000E+30
116 traj.phase0.states:xL_43 c -1.000000E+30 4.832474E-01 1.000000E+30
117 traj.phase0.states:xL_44 c -1.000000E+30 4.882948E-01 1.000000E+30
118 traj.phase0.states:xL_45 c -1.000000E+30 4.998528E-01 1.000000E+30
119 traj.phase0.states:xL_46 c -1.000000E+30 5.158004E-01 1.000000E+30
120 traj.phase0.states:xL_47 c -1.000000E+30 5.208478E-01 1.000000E+30
121 traj.phase0.states:xL_48 c -1.000000E+30 5.324057E-01 1.000000E+30
122 traj.phase0.states:xL_49 c -1.000000E+30 5.483534E-01 1.000000E+30
123 traj.phase0.states:xL_50 c -1.000000E+30 5.534008E-01 1.000000E+30
124 traj.phase0.states:xL_51 c -1.000000E+30 5.649587E-01 1.000000E+30
125 traj.phase0.states:xL_52 c -1.000000E+30 5.809064E-01 1.000000E+30
126 traj.phase0.states:xL_53 c -1.000000E+30 5.859537E-01 1.000000E+30
127 traj.phase0.states:xL_54 c -1.000000E+30 5.975117E-01 1.000000E+30
128 traj.phase0.states:xL_55 c -1.000000E+30 6.134594E-01 1.000000E+30
129 traj.phase0.states:xL_56 c -1.000000E+30 6.185067E-01 1.000000E+30
130 traj.phase0.states:xL_57 c -1.000000E+30 6.300647E-01 1.000000E+30
131 traj.phase0.states:xL_58 c -1.000000E+30 6.460123E-01 1.000000E+30
132 traj.phase0.states:xL_59 c -1.000000E+30 6.510597E-01 1.000000E+30
133 traj.phase0.states:xL_60 c -1.000000E+30 6.626177E-01 1.000000E+30
134 traj.phase0.states:xL_61 c -1.000000E+30 6.785653E-01 1.000000E+30
135 traj.phase0.states:xL_62 c -1.000000E+30 6.836127E-01 1.000000E+30
136 traj.phase0.states:xL_63 c -1.000000E+30 6.951707E-01 1.000000E+30
137 traj.phase0.states:xL_64 c -1.000000E+30 7.111183E-01 1.000000E+30
138 traj.phase0.states:xL_65 c -1.000000E+30 7.161657E-01 1.000000E+30
139 traj.phase0.states:xL_66 c -1.000000E+30 7.277237E-01 1.000000E+30
140 traj.phase0.states:xL_67 c -1.000000E+30 7.436713E-01 1.000000E+30
141 traj.phase0.states:xL_68 c -1.000000E+30 7.487187E-01 1.000000E+30
142 traj.phase0.states:xL_69 c -1.000000E+30 7.602766E-01 1.000000E+30
143 traj.phase0.states:xL_70 c -1.000000E+30 7.762243E-01 1.000000E+30
144 traj.phase0.states:xL_71 c -1.000000E+30 7.812717E-01 1.000000E+30
Constraints (i - inequality, e - equality)
Index Name Type Lower Value Upper Status Lagrange Multiplier (N/A)
0 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.266705E-16 0.000000E+00 9.00000E+100
1 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
2 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
3 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.544261E-16 0.000000E+00 9.00000E+100
4 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
5 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.544261E-16 0.000000E+00 9.00000E+100
6 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 6.707597E-16 0.000000E+00 9.00000E+100
7 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
8 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
9 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.544261E-16 0.000000E+00 9.00000E+100
10 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.117077E-16 0.000000E+00 9.00000E+100
11 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.544261E-16 0.000000E+00 9.00000E+100
12 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
13 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.266705E-16 0.000000E+00 9.00000E+100
14 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
15 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.780983E-15 0.000000E+00 9.00000E+100
16 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -4.394633E-16 0.000000E+00 9.00000E+100
17 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.266705E-16 0.000000E+00 9.00000E+100
18 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
19 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
20 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
21 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.174187E-16 0.000000E+00 9.00000E+100
22 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.156482E-16 0.000000E+00 9.00000E+100
23 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.266705E-16 0.000000E+00 9.00000E+100
24 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.266705E-16 0.000000E+00 9.00000E+100
25 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.156482E-16 0.000000E+00 9.00000E+100
26 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -6.615079E-16 0.000000E+00 9.00000E+100
27 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 6.337523E-16 0.000000E+00 9.00000E+100
28 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
29 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.544261E-16 0.000000E+00 9.00000E+100
30 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -4.394633E-16 0.000000E+00 9.00000E+100
31 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.625929E-18 0.000000E+00 9.00000E+100
32 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.625929E-18 0.000000E+00 9.00000E+100
33 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -6.615079E-16 0.000000E+00 9.00000E+100
34 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.625929E-18 0.000000E+00 9.00000E+100
35 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.625929E-18 0.000000E+00 9.00000E+100
36 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
37 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 7.864080E-17 0.000000E+00 9.00000E+100
38 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
39 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -6.985153E-16 0.000000E+00 9.00000E+100
40 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
41 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.117077E-16 0.000000E+00 9.00000E+100
42 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.850372E-16 0.000000E+00 9.00000E+100
43 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.480297E-16 0.000000E+00 9.00000E+100
44 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.590520E-16 0.000000E+00 9.00000E+100
45 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -4.764707E-16 0.000000E+00 9.00000E+100
46 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
47 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
48 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.117077E-16 0.000000E+00 9.00000E+100
49 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
50 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
51 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -6.291264E-16 0.000000E+00 9.00000E+100
52 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 3.145632E-16 0.000000E+00 9.00000E+100
53 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.850372E-16 0.000000E+00 9.00000E+100
54 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
55 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 7.864080E-17 0.000000E+00 9.00000E+100
56 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
57 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 7.864080E-17 0.000000E+00 9.00000E+100
58 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -8.789266E-17 0.000000E+00 9.00000E+100
59 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.434038E-16 0.000000E+00 9.00000E+100
60 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -6.291264E-16 0.000000E+00 9.00000E+100
61 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 9.251859E-17 0.000000E+00 9.00000E+100
62 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -7.401487E-17 0.000000E+00 9.00000E+100
63 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -4.764707E-16 0.000000E+00 9.00000E+100
64 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
65 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 1.896631E-16 0.000000E+00 9.00000E+100
66 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.434038E-16 0.000000E+00 9.00000E+100
67 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.238150E-17 0.000000E+00 9.00000E+100
68 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.434038E-16 0.000000E+00 9.00000E+100
69 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 3.700743E-17 0.000000E+00 9.00000E+100
70 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.850372E-17 0.000000E+00 9.00000E+100
71 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 3.700743E-17 0.000000E+00 9.00000E+100
72 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
73 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301799E-11 0.000000E+00 9.00000E+100
74 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301801E-11 0.000000E+00 9.00000E+100
75 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
76 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301799E-11 0.000000E+00 9.00000E+100
77 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301797E-11 0.000000E+00 9.00000E+100
78 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301804E-11 0.000000E+00 9.00000E+100
79 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301799E-11 0.000000E+00 9.00000E+100
80 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301801E-11 0.000000E+00 9.00000E+100
81 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301802E-11 0.000000E+00 9.00000E+100
82 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301802E-11 0.000000E+00 9.00000E+100
83 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301802E-11 0.000000E+00 9.00000E+100
84 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301804E-11 0.000000E+00 9.00000E+100
85 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
86 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301804E-11 0.000000E+00 9.00000E+100
87 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
88 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301795E-11 0.000000E+00 9.00000E+100
89 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301809E-11 0.000000E+00 9.00000E+100
90 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
91 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
92 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301807E-11 0.000000E+00 9.00000E+100
93 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
94 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
95 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
96 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
97 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301804E-11 0.000000E+00 9.00000E+100
98 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301809E-11 0.000000E+00 9.00000E+100
99 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301779E-11 0.000000E+00 9.00000E+100
100 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
101 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301807E-11 0.000000E+00 9.00000E+100
102 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301809E-11 0.000000E+00 9.00000E+100
103 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301792E-11 0.000000E+00 9.00000E+100
104 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
105 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
106 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301804E-11 0.000000E+00 9.00000E+100
107 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301798E-11 0.000000E+00 9.00000E+100
108 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301829E-11 0.000000E+00 9.00000E+100
109 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301802E-11 0.000000E+00 9.00000E+100
110 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301807E-11 0.000000E+00 9.00000E+100
111 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
112 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301802E-11 0.000000E+00 9.00000E+100
113 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
114 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301811E-11 0.000000E+00 9.00000E+100
115 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301806E-11 0.000000E+00 9.00000E+100
116 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301800E-11 0.000000E+00 9.00000E+100
117 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301807E-11 0.000000E+00 9.00000E+100
118 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301785E-11 0.000000E+00 9.00000E+100
119 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
120 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301840E-11 0.000000E+00 9.00000E+100
121 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301802E-11 0.000000E+00 9.00000E+100
122 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
123 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301756E-11 0.000000E+00 9.00000E+100
124 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301823E-11 0.000000E+00 9.00000E+100
125 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301778E-11 0.000000E+00 9.00000E+100
126 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
127 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301807E-11 0.000000E+00 9.00000E+100
128 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
129 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301851E-11 0.000000E+00 9.00000E+100
130 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
131 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
132 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301778E-11 0.000000E+00 9.00000E+100
133 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301789E-11 0.000000E+00 9.00000E+100
134 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301800E-11 0.000000E+00 9.00000E+100
135 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301774E-11 0.000000E+00 9.00000E+100
136 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301807E-11 0.000000E+00 9.00000E+100
137 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301796E-11 0.000000E+00 9.00000E+100
138 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301818E-11 0.000000E+00 9.00000E+100
139 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301774E-11 0.000000E+00 9.00000E+100
140 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301818E-11 0.000000E+00 9.00000E+100
141 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301867E-11 0.000000E+00 9.00000E+100
142 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301789E-11 0.000000E+00 9.00000E+100
143 traj.phase0.collocation_constraint.defects:xL e 0.000000E+00 -4.301823E-11 0.000000E+00 9.00000E+100
Exit Status
Inform Description
0 Optimization terminated successfully.
--------------------------------------------------------------------------------
Simulating trajectory traj
Done simulating trajectory traj
Problem: problem
Driver: pyOptSparseDriver
success : True
iterations : 12
runtime : 7.5308E-01 s
model_evals : 13
model_time : 4.3063E-03 s
deriv_evals : 10
deriv_time : 3.4818E-02 s
exit_status : SUCCESS
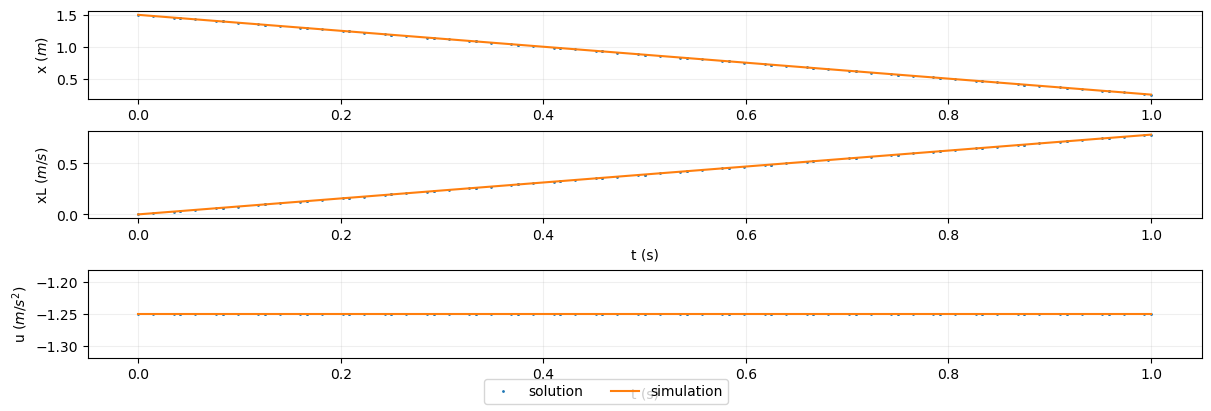
Plotting the solution
The recommended practice is to obtain values from the recorded cases.
While the problem object can also be queried for values, building plotting scripts that use the case recorder files as the data source means that the problem doesn’t need to be solved just to change a plot.
Here we load values of various variables from the solution and simulation for use in the animation to follow.
References
[Hul03]
David G Hull. Optimal Control Theory for Applications. Springer, 2003.