The Brachistochrone with externally-sourced initial state values#
Things you’ll learn through this example
How to link phase initial time and duration.
This is another modification of the brachistochrone in which the target initial time and duration of a phase is provided by an external source (an IndepVarComp in this case).
Rather than the external value being directly connected to the phase, the values are “linked” via state_ivc’s t_initial and t_duration.
The following script fully defines the brachistochrone problem with Dymos and solves it. A new IndepVarComp is added before the trajectory which provides t_initial and t_duration. These two outputs are connected directly into the phase. Also, it’s important to set input_duration and input_initial to True inside of set_time_options
import openmdao.api as om
import dymos as dm
import matplotlib.pyplot as plt
from dymos.examples.brachistochrone.brachistochrone_ode import BrachistochroneODE
#
# Define the OpenMDAO problem
#
p = om.Problem(model=om.Group())
# Instantiate the transcription so we can get the number of nodes from it while
# building the problem.
tx = dm.GaussLobatto(num_segments=10, order=3)
# Add an indep var comp to provide the external control values
ivc = p.model.add_subsystem('states_ivc', om.IndepVarComp(), promotes_outputs=['*'])
# Add the output to provide the values of theta at the control input nodes of the transcription.
# ivc.add_output('x0', shape=(1,), units='m')
ivc.add_output('t_initial', val=0.0, units='s')
ivc.add_output('t_duration', val=10., units='s')
ivc.add_design_var('t_duration', units='s', lower=0.1, upper=10.)
# Connect x0 to the state error component so we can constrain the given value of x0
# to be equal to the value chosen in the phase.
# p.model.connect('x0', 'state_error_comp.x0_target')
# p.model.connect('traj.phase0.timeseries.x', 'state_error_comp.x0_actual',
# src_indices=[0])
p.model.connect('t_initial', 'traj.phase0.t_initial')
p.model.connect('t_duration', 'traj.phase0.t_duration')
#
# Define a Trajectory object
#
traj = dm.Trajectory()
p.model.add_subsystem('traj', subsys=traj)
#
# Define a Dymos Phase object with GaussLobatto Transcription
#
phase = dm.Phase(ode_class=BrachistochroneODE,
transcription=tx)
traj.add_phase(name='phase0', phase=phase)
#
# Set the time options
# Time has no targets in our ODE.
# We fix the initial time so that the it is not a design variable in the optimization.
# The duration of the phase is allowed to be optimized, but is bounded on [0.5, 10]
# which is set above in state_ivc
phase.set_time_options(input_duration=True, input_initial=True, units='s')
#
# Set the time options
# Initial values of positions and velocity are all fixed.
# The final value of position are fixed, but the final velocity is a free variable.
# The equations of motion are not functions of position, so 'x' and 'y' have no targets.
# The rate source points to the output in the ODE which provides the time derivative of the
# given state.
phase.add_state('x', fix_initial=True, fix_final=True, units='m', rate_source='xdot')
phase.add_state('y', fix_initial=True, fix_final=True, units='m', rate_source='ydot')
phase.add_state('v', fix_initial=True, fix_final=False, units='m/s',
rate_source='vdot', targets=['v'])
# Define theta as a control.
# Use opt=False to allow it to be connected to an external source.
# Arguments lower and upper are no longer valid for an input control.
phase.add_control(name='theta', units='rad', targets=['theta'])
# Minimize final time.
phase.add_objective('time', loc='final')
# Set the driver.
p.driver = om.ScipyOptimizeDriver()
# Allow OpenMDAO to automatically determine our sparsity pattern.
# Doing so can significant speed up the execution of Dymos.
p.driver.declare_coloring()
# Setup the problem
p.setup(check=True)
# Now that the OpenMDAO problem is setup, we can set the values of the states.
# p.set_val('x0', 0.0, units='m')
# Here we're intentially setting the intiial x value to something other than zero, just
# to demonstrate that the optimizer brings it back in line with the value of x0 set above.
phase.set_state_val('x', [0, 10],
units='m')
phase.set_state_val('y', [10, 5],
units='m')
phase.set_state_val('v', [0, 9.9],
units='m/s')
phase.set_control_val('theta', [5, 100.5],
units='deg')
# Run the driver to solve the problem
dm.run_problem(p, simulate=True)
INFO: checking out_of_order...
INFO: out_of_order check complete (0.000290 sec).
INFO: checking system...
INFO: system check complete (0.000023 sec).
INFO: checking solvers...
INFO: solvers check complete (0.000209 sec).
INFO: checking dup_inputs...
INFO: dup_inputs check complete (0.000058 sec).
INFO: checking missing_recorders...
INFO: missing_recorders check complete (0.000003 sec).
INFO: checking unserializable_options...
INFO: unserializable_options check complete (0.001116 sec).
INFO: checking comp_has_no_outputs...
INFO: comp_has_no_outputs check complete (0.000030 sec).
INFO: checking auto_ivc_warnings...
INFO: auto_ivc_warnings check complete (0.000003 sec).
Jacobian shape: (40, 50) (13.40% nonzero)
FWD solves: 8 REV solves: 0
Total colors vs. total size: 8 vs 50 (84.00% improvement)
Sparsity computed using tolerance: 1e-25.
Dense total jacobian for Problem 'problem' was computed 3 times.
Time to compute sparsity: 0.0551 sec
Time to compute coloring: 0.0332 sec
Memory to compute coloring: 0.2852 MB
Coloring created on: 2026-05-13 14:55:09
Optimization terminated successfully (Exit mode 0)
Current function value: 1.8016052392021373
Iterations: 39
Function evaluations: 40
Gradient evaluations: 39
Optimization Complete
-----------------------------------
Simulating trajectory traj
Done simulating trajectory traj
Problem: problem
Driver: ScipyOptimizeDriver
success : True
iterations : 41
runtime : 5.5876E-01 s
model_evals : 42
model_time : 2.2338E-02 s
deriv_evals : 39
deriv_time : 1.7944E-01 s
exit_status : SUCCESS
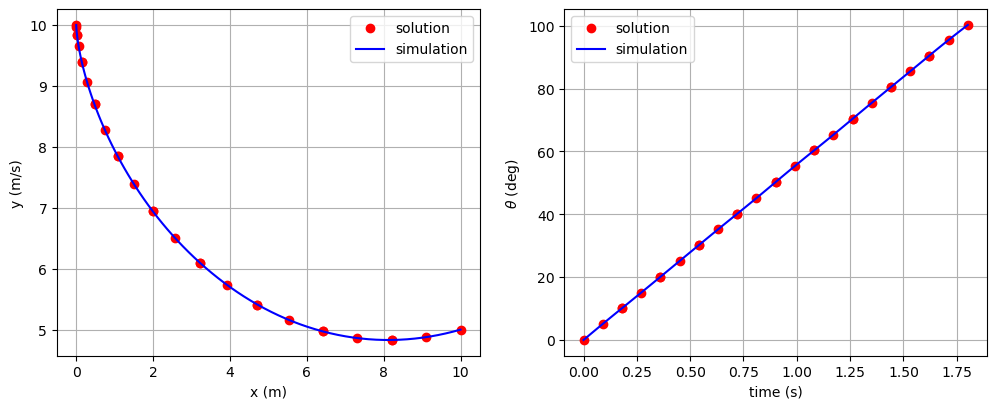
Plotting the results#
In the following cell, we load the solution and simulated results from their respective recorder files and plot the solution.
# Check the validity of our results.
sol = om.CaseReader(p.get_outputs_dir() / 'dymos_solution.db').get_case('final')
sim = om.CaseReader(traj.sim_prob.get_outputs_dir() / 'dymos_simulation.db').get_case('final')
# Plot the results
fig, axes = plt.subplots(nrows=1, ncols=2, figsize=(12, 4.5))
axes[0].plot(sol.get_val('traj.phase0.timeseries.x'),
sol.get_val('traj.phase0.timeseries.y'),
'ro', label='solution')
axes[0].plot(sim.get_val('traj.phase0.timeseries.x'),
sim.get_val('traj.phase0.timeseries.y'),
'b-', label='simulation')
axes[0].set_xlabel('x (m)')
axes[0].set_ylabel('y (m/s)')
axes[0].legend()
axes[0].grid()
axes[1].plot(sol.get_val('traj.phase0.timeseries.time'),
sol.get_val('traj.phase0.timeseries.theta', units='deg'),
'ro', label='solution')
axes[1].plot(sim.get_val('traj.phase0.timeseries.time'),
sim.get_val('traj.phase0.timeseries.theta', units='deg'),
'b-', label='simulation')
axes[1].set_xlabel('time (s)')
axes[1].set_ylabel(r'$\theta$ (deg)')
axes[1].legend()
axes[1].grid()
plt.show()